I.Robot Kaynak Açıklaması:
1. U-kaburga plakaları ve köprü plaka üniteleri gibi büyük bileşenleri kaynaklayabilen güçlü uygulanabilirlik;
2. Çeşitli uzun ve kavisli kaynakları kaynaklayabilen geniş çalışma alanı;
3.Tek robotun ortak çalışması, kaynak verimliliğini etkili bir şekilde artırır, kaynak deformasyonunu azaltır ve kaynak kalitesini sağlar;
4. Portal yürüyüş yolu ile işbirliği yaparak, iş parçalarının eş zamanlı olarak kaynaklanması ve taşınmasını sağlamak, böylece üretim verimliliğini artırmak mümkündür.
5.Yazılım, 1-2 günlük eğitim sonrasında kusursuz bir şekilde çalıştırılabilir ve yükleme sonrasında tüm süreç boyunca manuel müdahaleye gerek kalmaz, bu da operatörlerin beceri gereksinimlerini büyük ölçüde azaltır.
II.Robot Kaynak Parametreleri:
| İçerik |
Parametre Aralığı |
Birim |
Notlar |
| Serbestlik Derecesi (Eksenler) |
9 |
/ |
/ |
| Gerekli Ortam Sıcaklığı |
-10~45 |
°C |
/ |
| Maksimum Uç Yükü |
6 |
Kilogram |
/ |
| Önerilen Zemin Alanı |
W8000*L20000*H2000 |
mm |
/ |
| Tepe Toplam Güç |
60 |
kW |
/ |
| Nominal Giriş Gerilimi/Frekansı |
380+/-%10 |
V |
Üç fazlı |
| Nominal Giriş Frekansı |
50 |
Hz. |
/ |
| Kat Alanı |
10000*22000 |
mm |
/ |
III. Robot Kaynak Avantajları:
 |
Robot Entegre Tahrik ve Kontrol Sistemi
1. Geleneksel öğretim programlama sisteminde devrim yaratan yerleşik bir robot sürücü sistemi ile birlikte gelir.
2. Yazılım, robotun hareket yörüngesini otomatik olarak planlar ve kaynak duruşunu ayarlar.
3. Yazılım planlaması, robotun engellerden akıllıca kaçınmasına olanak tanır.
4. Çarpışma algılama ve izleme ile donatılmıştır. |
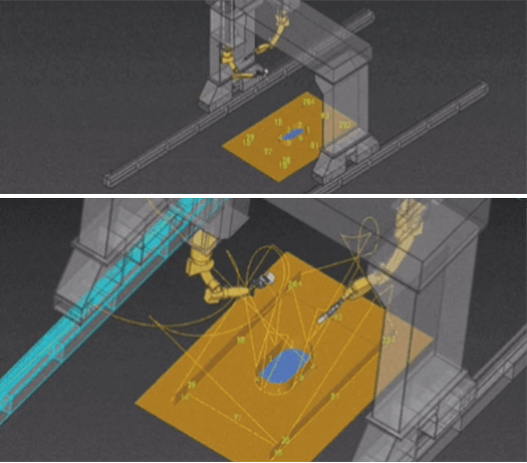
Dijital İkiz Sistem
1. Sahne modeli, fiziksel nesnenin 1:1 kopyasını sunar; ne görürseniz onu alırsınız.
2. Fiziksel nesnenin hareketleri takip ettiği bilgisayar arayüzü aracılığıyla işlem. 3. Sahne tarafından oluşturulan yörünge, tek tıklamayla komut ve kaynaklama başlayabilir. 4. Gerçek zamanlı iletişim, sanal ve fizikselin entegrasyonu, komut yürütme. |
 |
 |
Öğretme Yok, Programlama Yok
1. Otomatik Programlama · Akıllı ve Kullanışlı: İş parçasının 3D modelini içe aktarın, kaynak dikişi bilgilerini otomatik olarak tanıyın ve çıkarın. Sadece modele tıklayarak kaynak dikişini düzenleyebilirsiniz, bu da operasyonel zorluğu azaltır ve personelin kolayca başlamasına olanak tanır.
2. Proses Komutları · Hızlı Dağıtım: Köşe kaynakları, aralıklı kaynak, çok katmanlı ve çok geçişli komutlar tek tıklamayla seçilebilir.
3. Görsel Yönlendirme · Otomatik Yol Planlama: Çizgi lazer taramayı kullanan robot, kaynak dikişinin başlangıç ve bitiş konumlarını hızlı bir şekilde bulur. |
Dahili Kaynak İşlemi Kitaplığı
1. Plan İçe Aktarma - Parametrik Modelleme: İş parçasının 3 boyutlu planlarını içe aktarın. Halihazırda düzenlenmiş kaynak dikişleri ile iş parçası planlarının dışa ve içe aktarılmasını destekler. Köşebentler ve I-kirişler gibi benzer türdeki iş parçaları için parametrik modelleme.
2. Kaynak Dikişi Düzenleme: Kaynak dikişlerini toplu olarak oluşturmak, kaynak deliklerini kırmak ve kenarları sürekli kaynaklamak için kaynak kenarlarını seçin. Kaynak dikişine göre kaynak işlemlerini seçin (çok katmanlı ve çok geçişli, yukarıya doğru dikey köşe kaynağı).
3. Simülasyon Kontrolü: Koşu yörüngesinin makul olup olmadığını veya herhangi bir müdahale olup olmadığını doğrulayın. Kaynak açısının kaynak işlemine uygun olduğundan emin olun. |
 |
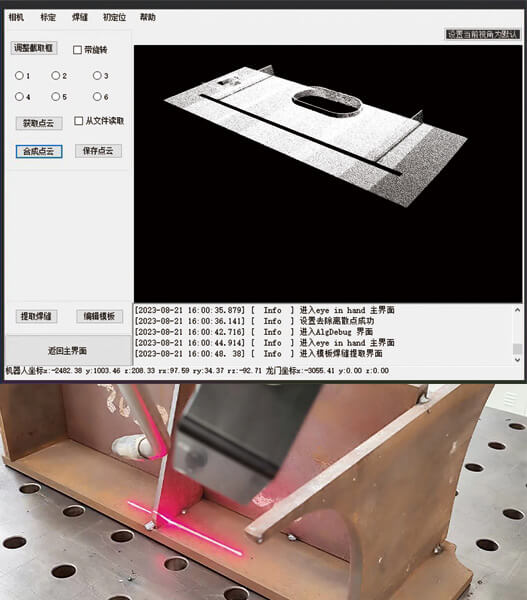 |
Görsel Konumlandırma ve Takip Modülü
1. 3D Kamera İlk Konumlandırma:
2m x 2m'lik geniş bir alanı yakalar; nokta bulutu verileri için birden fazla fotoğraf bir araya getirilebilir; daha büyük iş parçaları konusunda endişelenmenize gerek kalmaz.
Fotoğraflama doğruluğu ±0,5 mm'lik bir hata payına sahiptir ve kaynak hassasiyeti gereksinimlerini tam olarak karşılar.
2. Çizgi Lazer Kılavuz Modülü:
Kaynak dikişi bilgilerini aktif olarak toplar ve bunu gerçek zamanlı olarak işler, kaynak yörüngesini düzeltmek veya kaynağı yönlendirmek için kullanılabilen kaynak dikişinin konumunu elde etmek için toplanan görüntüleri analiz eder.
3. 'Eldeki Göz' - Bileşik 3D Kamera:
'Eldeki göz' sistemi aracılığıyla karmaşık çalışma koşullarındaki görüntüleme zorluklarını çözer:
(1). Geniş görüş alanı, yüksek hassasiyet, 3D.
(2). İş parçasının konumunu ve duruşunu doğru bir şekilde yansıtır; görüntü yakalama ve sonuç çıktı süresi bir saniyeden azdır.
(3). Hassas konumlandırma, kaynak işlemi sırasında çarpışmaları önler.
(4). Tam grafik arayüz operasyonu - önceden robot operasyonu deneyimi gerektirmez, tüm iş akışını kolayca tamamlar. |
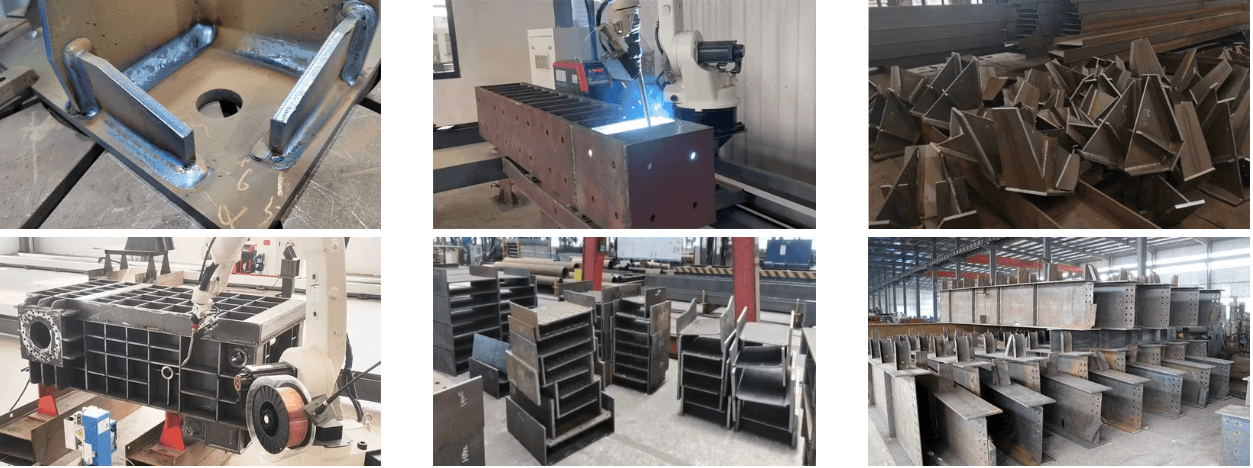
IV. Kaynak Robotu Kaynak Tipi

V.Robot Kaynak Örnekleri