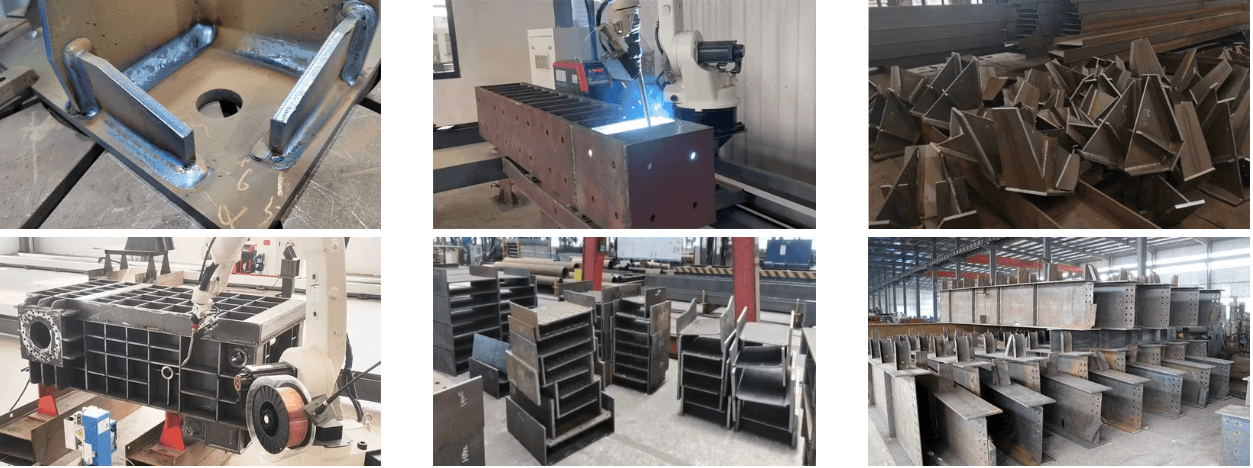
1. İnek bacakları, kule ayakları, aşık destek plakaları ve daha fazlası gibi çeşitli küçük bileşenler için uygundur.
2. Verimliliği en üst düzeye çıkarmak için eşzamanlı kaynak ve işlemeye olanak tanıyan esnek iş parçası konumlandırmayı etkinleştirir.
3. Çalışma tezgahları veya tek/çift eksenli konumlandırıcılar, farklı kaynak senaryolarını karşılamak üzere iş parçası tipine ve kaynak gereksinimlerine göre özelleştirilebilir.
4.Yazılım, 1-2 günlük eğitimden sonra kusursuz bir şekilde çalıştırılabilir ve yükleme sonrasında tüm süreç boyunca manuel müdahaleye gerek kalmaz, bu da operatörlerin beceri gereksinimlerini büyük ölçüde azaltır.
| İçerik | Parametre Aralığı | Birim | Notlar |
| Serbestlik Derecesi (Eksenler) | 6+2+2 | / | / |
| Gerekli Ortam Sıcaklığı | -10~45 | °C | / |
| Maksimum Uç Yükü | 6 | Kilogram | / |
| Önerilen Zemin Alanı | W1000*L1000*H600 | mm | / |
| Tepe Toplam Güç | 45 | kW | / |
| Nominal Giriş Gerilimi/Frekansı | 380+/-%10 | V | Üç fazlı |
| Nominal Giriş Frekansı | 50 | Hz. | / |
| Kat Alanı | 2400*4000 | mm | / |
 |
Robot Entegre Tahrik ve Kontrol Sistemi
4. Çarpışma algılama ve izleme ile donatılmıştır. |
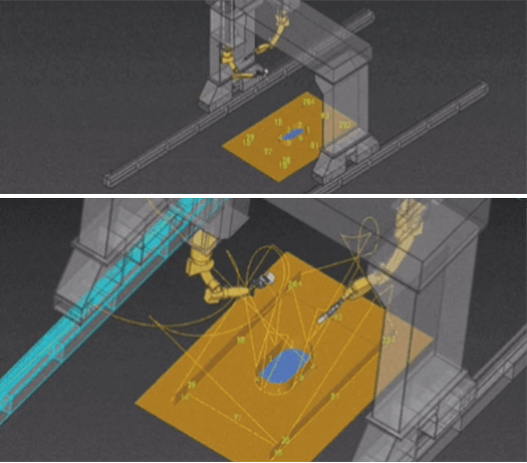
Dijital İkiz Sistem
2. Fiziksel nesnenin hareketleri takip ettiği bilgisayar arayüzü aracılığıyla işlem. 3. Sahne tarafından oluşturulan yörünge, tek tıklamayla komut ve kaynaklama başlayabilir. 4. Gerçek zamanlı iletişim, sanal ve fizikselin entegrasyonu, komut yürütme. |
 |
 |
Öğretme Yok, Programlama Yok
2. Proses Komutları · Hızlı Dağıtım: Köşe kaynakları, aralıklı kaynak, çok katmanlı ve çok geçişli komutlar tek tıklamayla seçilebilir. 3. Görsel Yönlendirme · Otomatik Yol Planlama: Çizgi lazer taramayı kullanan robot, kaynak dikişinin başlangıç ve bitiş konumlarını hızlı bir şekilde bulur. |
Dahili Kaynak İşlemi Kitaplığı
2. Kaynak Dikişi Düzenleme: Kaynak dikişlerini toplu olarak oluşturmak, kaynak deliklerini kırmak ve kenarları sürekli kaynaklamak için kaynak kenarlarını seçin. Kaynak dikişine göre kaynak işlemlerini seçin (çok katmanlı ve çok geçişli, yukarıya doğru dikey köşe kaynağı). 3. Simülasyon Kontrolü: Koşu yörüngesinin makul olup olmadığını veya herhangi bir müdahale olup olmadığını doğrulayın. Kaynak açısının kaynak işlemine uygun olduğundan emin olun. |
 |
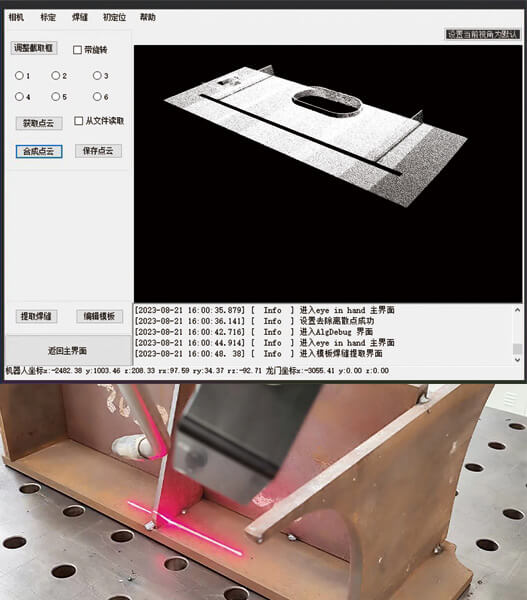 |
Görsel Konumlandırma ve Takip Modülü
(2). İş parçasının konumunu ve duruşunu doğru bir şekilde yansıtır; görüntü yakalama ve sonuç çıktı süresi bir saniyeden azdır. (3). Hassas konumlandırma, kaynak işlemi sırasında çarpışmaları önler. (4). Tam grafik arayüz operasyonu - önceden robot operasyonu deneyimi gerektirmez, tüm iş akışını kolayca tamamlar. |