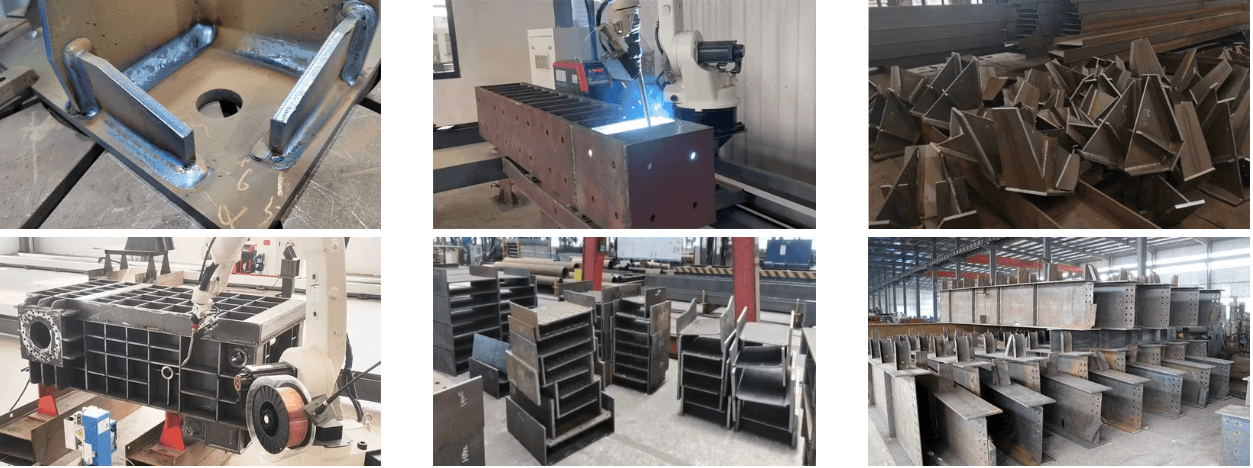
1. مناسبة لمختلف المكونات الصغيرة مثل أرجل البقر وأرجل البرج وألواح دعم المدادة والمزيد.
2. تمكن من تحديد موضع قطع العمل بشكل مرن، مما يسمح باللحام والتعامل المتزامن لتحقيق أقصى قدر من الكفاءة.
3. يمكن تخصيص مناضد العمل أو أدوات تحديد الموضع أحادية/مزدوجة المحور بناءً على نوع قطعة العمل ومتطلبات اللحام لتلبية سيناريوهات اللحام المختلفة.
4. يمكن تشغيل البرنامج بطريقة مضمونة بعد 1-2 يوم من التدريب، وليست هناك حاجة للتدخل اليدوي طوال العملية بأكملها بعد التحميل، مما يقلل بشكل كبير من متطلبات المهارات للمشغلين.
| محتوى | نطاق المعلمة | وحدة | ملاحظات |
| درجات الحرية (المحاور) | 6+2+2 | / | / |
| درجة الحرارة المحيطة المطلوبة | -10~45 | درجة مئوية | / |
| الحد الأقصى للحمل النهائي | 6 | كجم | / |
| المساحة الأرضية الموصى بها | العرض 1000 * الطول 1000 * الارتفاع 600 | مم | / |
| ذروة الطاقة الإجمالية | 45 | كيلوواط | / |
| تصنيف جهد الإدخال/التردد | 380+/-10% | V | ثلاث مراحل |
| تردد الإدخال المقدر | 50 | هرتز | / |
| مساحة الأرضية | 2400*4000 | مم | / |
 |
نظام القيادة والتحكم المتكامل للروبوت
4. مجهزة بكشف الاصطدام ومراقبته. |
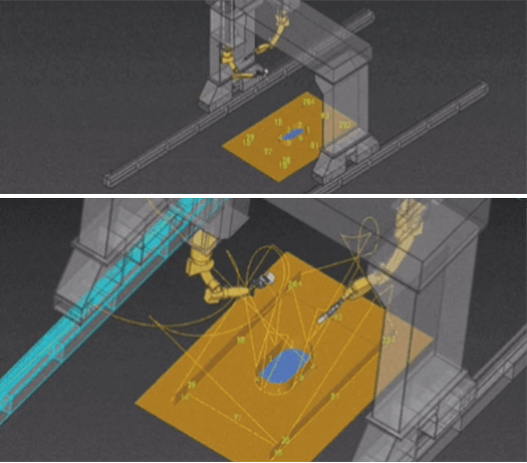
نظام التوأم الرقمي
2. التشغيل من خلال واجهة الكمبيوتر، مع تتبع الكائن المادي للحركات. 3. يمكن أن يبدأ المسار الناتج عن المشهد، والأمر بنقرة واحدة، واللحام. 4. الاتصال في الوقت الحقيقي، والتكامل بين الظاهري والمادي، وتنفيذ الأوامر. |
 |
 |
لا تدريس ولا برمجة
2. أوامر العملية · النشر السريع: يمكن تحديد اللحامات الزاوية واللحام المتقطع والأوامر متعددة الطبقات والممرات المتعددة بنقرة واحدة. 3. توجيه الرؤية · تخطيط المسار التلقائي: باستخدام المسح بالليزر الخطي، يحدد الروبوت بسرعة موضع البداية والنهاية لدرزة اللحام. |
مكتبة عمليات اللحام المدمجة
2. تحرير التماس اللحام: حدد حواف اللحام لإنشاء طبقات اللحام دفعة واحدة، وكسر فتحات اللحام، ولحام الحواف بشكل مستمر. اختر عمليات اللحام وفقًا لدرزة اللحام (لحام زاوية عمودي متعدد الطبقات ومتعدد التمريرات). 3. فحص المحاكاة: التحقق مما إذا كان مسار التشغيل معقولاً، أو إذا كان هناك أي تداخل. التأكد من أن زاوية اللحام تناسب عملية اللحام. |
 |
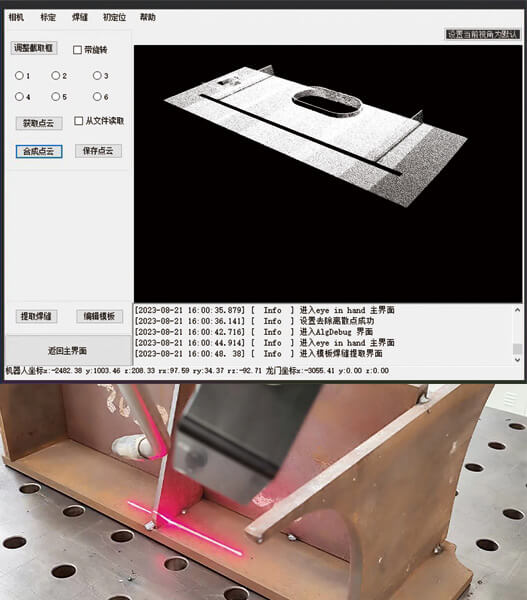 |
وحدة تحديد المواقع والتتبع المرئية
(2). يعكس بدقة موضع ووضعية قطعة العمل، مع التقاط الصورة للحصول على وقت إخراج أقل من ثانية واحدة. (3). تحديد المواقع بدقة يمنع الاصطدامات أثناء عملية اللحام. (4). تشغيل كامل للواجهة الرسومية - لا يلزم وجود خبرة سابقة في تشغيل الروبوت، مما يسهل إكمال سير العمل بالكامل. |