Módulo de seguimiento y posicionamiento visual
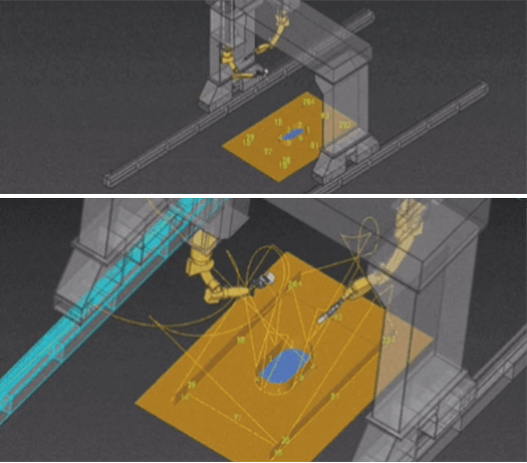
1. Posicionamiento inicial de la cámara 3D:
captura un área grande de 2 mx 2 m; Se pueden unir varias fotografías para obtener datos de nubes de puntos, sin preocuparse por piezas de trabajo más grandes.
La precisión de la fotografía tiene un margen de error de ±0,5 mm, lo que cumple plenamente con los requisitos de precisión de soldadura.
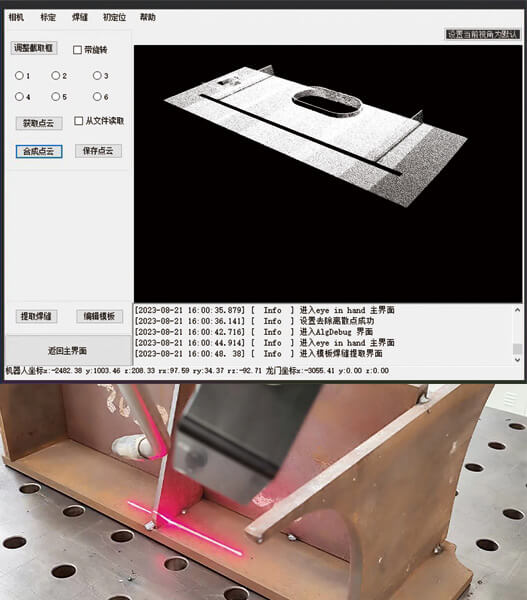
2. Módulo de guía láser de línea:
recopila activamente información de la costura de soldadura y la procesa en tiempo real, analizando las imágenes recopiladas para adquirir la posición de la costura de soldadura, que se puede utilizar para corregir la trayectoria de soldadura o guiar la soldadura.
3. Cámara 3D compuesta 'Eye-in-Hand':
Resuelve desafíos de imágenes en condiciones de trabajo complejas a través del sistema 'eye-in-hand':
(1). Amplio campo de visión, alta precisión, 3D.
(2). Refleja con precisión la posición y postura de la pieza de trabajo, y el tiempo de captura de imagen para generar resultados es inferior a un segundo.
(3). El posicionamiento preciso evita colisiones durante el proceso de soldadura.
(4). Operación de interfaz gráfica completa: no se requiere experiencia previa en operación de robots, lo que completa fácilmente todo el flujo de trabajo. |