Module de positionnement et de suivi visuel
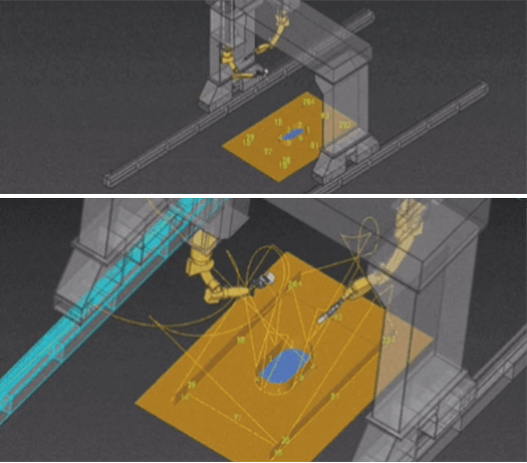
1. Positionnement initial de la caméra 3D :
capture une grande surface de 2 m x 2 m ; plusieurs photos peuvent être assemblées pour obtenir des données de nuages de points, sans vous soucier des pièces plus grandes.
La précision photographique a une marge d'erreur de ± 0,5 mm, répondant pleinement aux exigences de précision du soudage.
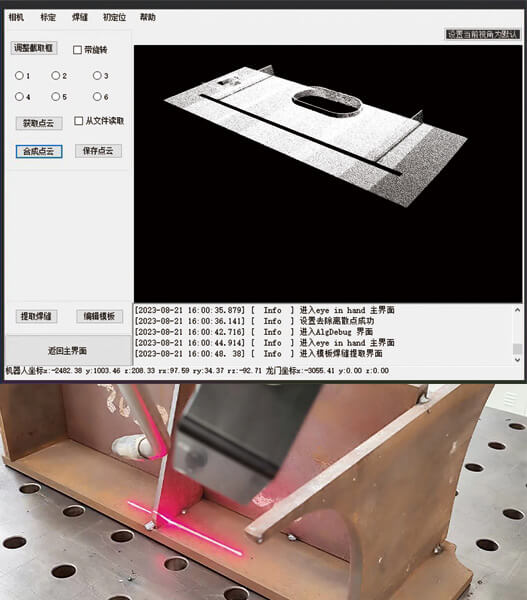
2. Module de guidage laser linéaire :
collecte activement les informations sur le cordon de soudure et les traite en temps réel, en analysant les images collectées pour acquérir la position du cordon de soudure, qui peut être utilisée pour corriger la trajectoire de soudage ou guider le soudage.
3. Caméra 3D composée « œil dans la main » :
résout les problèmes d'imagerie dans des conditions de travail complexes grâce au système « œil dans la main » :
(1). Grand champ de vision, haute précision, 3D.
(2). Reflète avec précision la position et la posture de la pièce à usiner, avec un temps de capture d'image pour obtenir le résultat inférieur à une seconde.
(3). Un positionnement précis évite les collisions pendant le processus de soudage.
(4). Fonctionnement de l'interface graphique complète : aucune expérience préalable en fonctionnement du robot n'est requise, complétant facilement l'ensemble du flux de travail. |