| Quantidade: | |
|---|---|











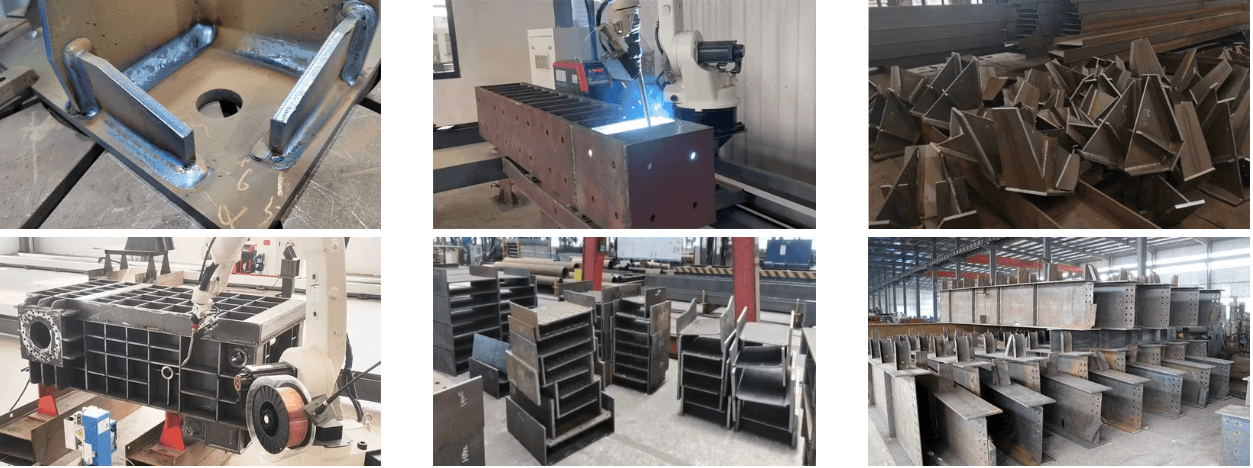
1. Adequado para vários componentes pequenos, como pernas de vaca, pernas de torre, placas de suporte de terça e muito mais.
2. Permite o posicionamento flexível da peça, permitindo soldagem e manuseio simultâneos para maximizar a eficiência.
3. Bancadas de trabalho ou posicionadores de eixo único/duplo podem ser personalizados com base no tipo de peça e requisitos de soldagem para atender a diferentes cenários de soldagem.
4.O software pode ser operado de maneira infalível após 1-2 dias de treinamento e não há necessidade de intervenção manual durante todo o processo após o carregamento, reduzindo significativamente os requisitos de habilidade dos operadores.
| Contente | Faixa de parâmetros | Unidade | Observações |
| Graus de liberdade (eixos) | 6+2+2 | / | / |
| Temperatura ambiente necessária | -10~45 | ºC | / |
| Carga final máxima | 6 | Kg | / |
| Espaço recomendado | W1000*L1000*H600 | milímetros | / |
| Pico de potência total | 45 | kW | / |
| Tensão/frequência nominal de entrada | 380+/-10% | V | Trifásico |
| Frequência de entrada nominal | 50 | Hz | / |
| Espaço físico | 2400*4000 | milímetros | / |
 |
Sistema Integrado de Acionamento e Controle do Robô
4. Equipado com detecção e monitoramento de colisão. |
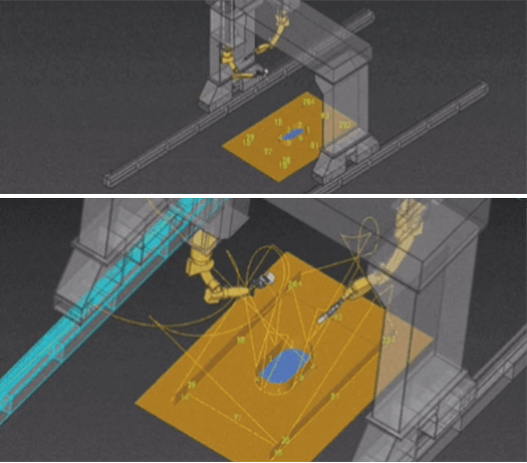
Sistema gêmeo digital
2. Operação através da interface do computador, com o objeto físico acompanhando os movimentos. 3. A trajetória gerada pela cena, o comando de um clique e a soldagem podem começar. 4. Comunicação em tempo real, integração de virtual e físico, execução de comandos. |
 |
 |
Sem ensino, sem programação
2. Comandos de processo · Implementação rápida: Soldas de canto, soldagem intermitente, comandos multicamadas e multipassagens podem ser selecionados com um clique. 3. Orientação visual · Planejamento automático do caminho: Usando a varredura a laser em linha, o robô localiza rapidamente as posições inicial e final da costura de soldagem. |
Biblioteca integrada de processos de soldagem
2. Edição de cordões de solda: selecione arestas de solda para gerar cordões de solda em lote, romper furos de solda e soldar arestas continuamente. Escolha os processos de soldagem de acordo com a costura de solda (multicamadas e multipassagens, soldagem de canto vertical ascendente). 3. Verificação de simulação: Verifique se a trajetória de corrida é razoável ou se há alguma interferência. Certifique-se de que o ângulo de soldagem atenda ao processo de soldagem. |
 |
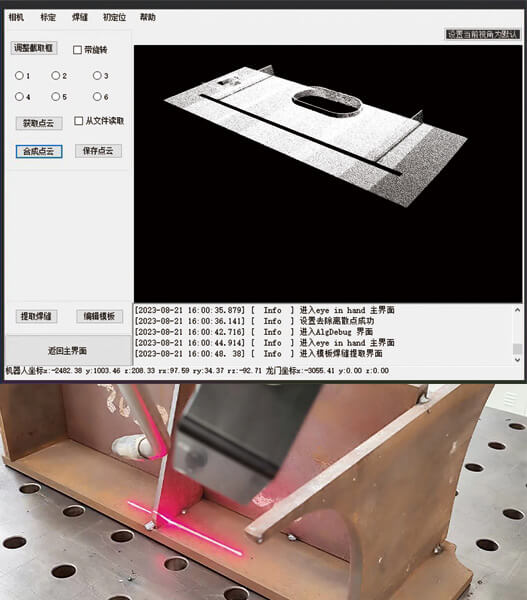 |
Módulo de Posicionamento Visual e Rastreamento
(2). Reflete com precisão a posição e a postura da peça de trabalho, com a captura de imagem resultando em tempo de saída inferior a um segundo. (3). O posicionamento preciso evita colisões durante o processo de soldagem. (4). Operação completa da interface gráfica - sem necessidade de experiência anterior em operação de robô, completando facilmente todo o fluxo de trabalho. |