I. Descripción de soldadura por robot:
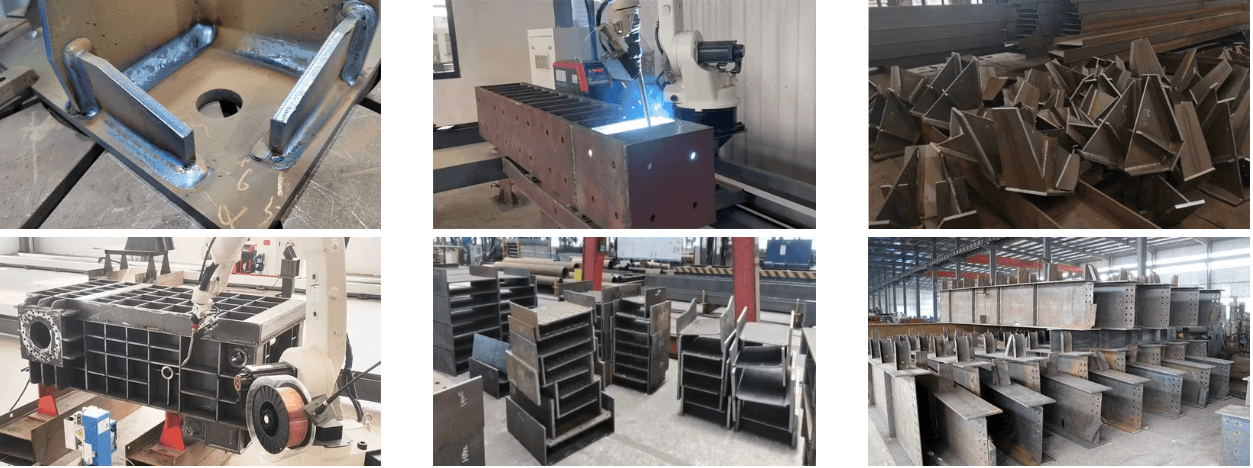
1.Soldadura de componentes abiertos como vigas en H, vigas de techo, columnas tipo cajón y otros componentes soldados en las esquinas.
2.Agregue un séptimo eje, robot y control de seguimiento de seguimiento, área de trabajo más grande.
3. Las áreas de trabajo se pueden configurar en ambos lados de la vía y las áreas de trabajo se pueden organizar en secciones para soldar piezas pequeñas.
4. Los trabajos de soldadura y manipulación se pueden realizar simultáneamente, mejorando efectivamente la eficiencia de la producción.
5. El software se puede operar de manera infalible después de 1 o 2 días de capacitación y no hay necesidad de intervención manual durante todo el proceso después de la carga, lo que reduce en gran medida los requisitos de habilidades de los operadores.
6.El posicionador puede ser opcional.
II.Parámetros de soldadura del robot:
| Contenido |
Rango de parámetros |
Unidad |
Observaciones |
| Grados de libertad (ejes) |
7 |
/ |
/ |
| Temperatura ambiente requerida |
-10~45 |
ºC |
/ |
| Carga final máxima |
6 |
kilos |
/ |
| Espacio recomendado |
Anchura 2000*L12000*H650 |
milímetros |
/ |
| Potencia total máxima |
45 |
kilovatios |
/ |
| Voltaje/frecuencia de entrada nominal |
380+/-10% |
V |
trifásico |
| Frecuencia de entrada nominal |
50 |
Hz |
/ |
| Espacio de piso |
1500*15000 |
milímetros |
/ |
III. Ventajas de la soldadura robotizada:
 |
Sistema de control y accionamiento integrado del robot
1. Viene con un sistema de accionamiento de robot incorporado, que revoluciona el sistema de programación de enseñanza tradicional.
2. El software planifica automáticamente la trayectoria de movimiento del robot y ajusta la postura de soldadura.
3. La planificación del software permite que el robot evite obstáculos de forma inteligente.
4. Equipado con detección y monitoreo de colisiones. |
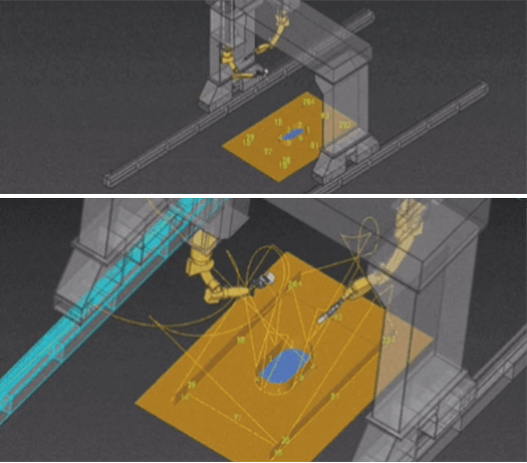
Sistema gemelo digital
1. El modelo de escena presenta una réplica 1:1 del objeto físico: lo que ves es lo que obtienes.
2. Operación a través de la interfaz de la computadora, con el objeto físico siguiendo los movimientos. 3. Se puede comenzar la trayectoria generada por la escena, el comando con un clic y la soldadura. 4. Comunicación en tiempo real, integración virtual y física, ejecución de comandos. |
 |
 |
Sin enseñanza, sin programación
1. Programación automática · Inteligente y conveniente: importe el modelo 3D de la pieza de trabajo, reconozca y extraiga automáticamente información de la costura de soldadura. Puede editar la costura de soldadura simplemente haciendo clic en el modelo, lo que reduce la dificultad operativa y permite al personal comenzar fácilmente.
2. Comandos de proceso · Implementación rápida: Se pueden seleccionar soldaduras de esquina, soldadura intermitente, comandos multicapa y multipasada con un solo clic.
3. Guía visual · Planificación automática de ruta: mediante el escaneo láser lineal, el robot localiza rápidamente las posiciones inicial y final de la costura de soldadura. |
Biblioteca de procesos de soldadura incorporada
1. Importación de planos - Modelado paramétrico: importe planos 3D de la pieza de trabajo. Admite la exportación e importación de planos de piezas de trabajo con cordones de soldadura ya editados. Modelado paramétrico para tipos similares de piezas de trabajo, como refuerzos y vigas en I.
2. Edición de costuras de soldadura: seleccione bordes de soldadura para generar costuras de soldadura por lotes, romper orificios de soldadura y soldar bordes de forma continua. Elija los procesos de soldadura de acuerdo con la costura de soldadura (soldadura de esquina vertical ascendente multicapa y multipasada).
3. Verificación de simulación: verifique si la trayectoria de carrera es razonable o si hay alguna interferencia. Asegúrese de que el ángulo de soldadura satisfaga el proceso de soldadura. |
 |
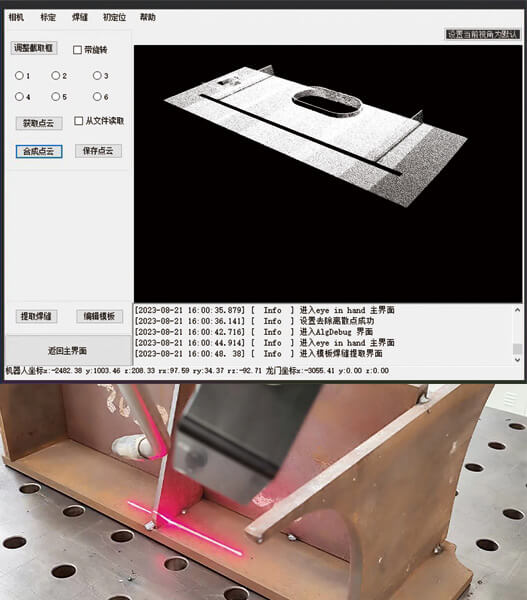 |
Módulo de seguimiento y posicionamiento visual
1. Posicionamiento inicial de la cámara 3D:
captura un área grande de 2 mx 2 m; Se pueden unir varias fotografías para obtener datos de nubes de puntos, sin preocuparse por piezas de trabajo más grandes.
La precisión de la fotografía tiene un margen de error de ±0,5 mm, lo que cumple plenamente con los requisitos de precisión de soldadura.
2. Módulo de guía láser de línea:
recopila activamente información de la costura de soldadura y la procesa en tiempo real, analizando las imágenes recopiladas para adquirir la posición de la costura de soldadura, que se puede utilizar para corregir la trayectoria de soldadura o guiar la soldadura.
3. Cámara 3D compuesta 'Eye-in-Hand':
Resuelve desafíos de imágenes en condiciones de trabajo complejas a través del sistema 'eye-in-hand':
(1). Amplio campo de visión, alta precisión, 3D.
(2). Refleja con precisión la posición y postura de la pieza de trabajo, y el tiempo de captura de imagen para generar resultados es inferior a un segundo.
(3). El posicionamiento preciso evita colisiones durante el proceso de soldadura.
(4). Operación de interfaz gráfica completa: no se requiere experiencia previa en operación de robots, lo que completa fácilmente todo el flujo de trabajo. |
IV. Tipo de soldadura del robot de soldadura

V.Muestras de soldadura por robot