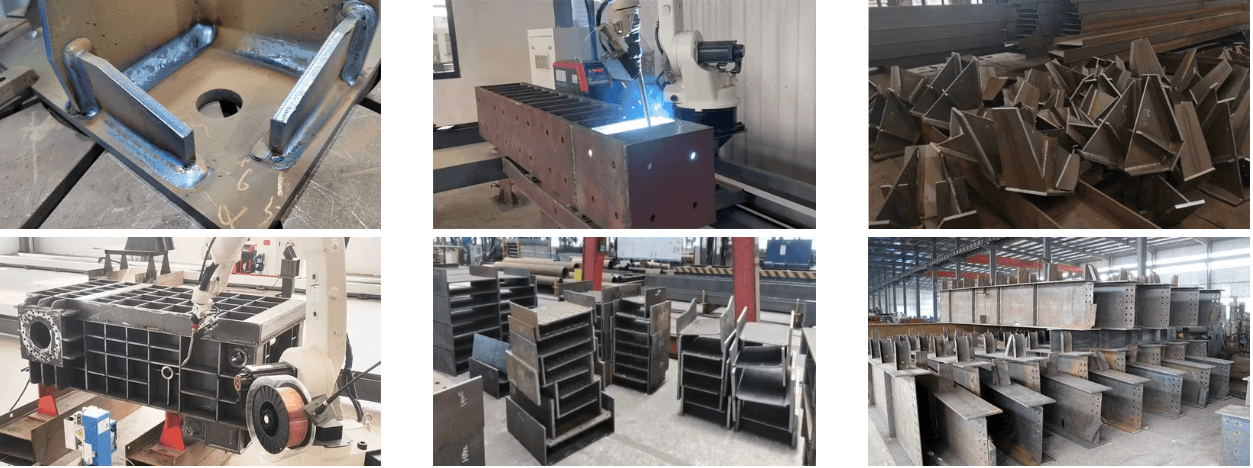
I. Description du soudage par robot :
1. Forte applicabilité, capable de souder de gros composants tels que des plaques à nervures en U et des unités de plaques de pont ;
zone de travail 2.Wide, capable de souder diverses soudures longues et courbes ;
3. L’opération collaborative d’un seul robot améliore efficacement l’efficacité du soudage, réduit la déformation du soudage et garantit la qualité du soudage ;
4.En coopérant avec le chemin de marche du portique, il est possible de réaliser un soudage et une manipulation simultanées des pièces, améliorant ainsi l'efficacité de la production.
5.Le logiciel peut être utilisé de manière infaillible après 1 à 2 jours de formation, et il n'est pas nécessaire d'intervenir manuellement tout au long du processus après le chargement, ce qui réduit considérablement les compétences requises pour les opérateurs.
Paramètres de soudage du robot :
| Contenu |
Plage de paramètres |
Unité |
Remarques |
| Degrés de liberté (axes) |
9 |
/ |
/ |
| Température ambiante requise |
-10~45 |
ºC |
/ |
| Charge finale maximale |
6 |
Kilogrammes |
/ |
| Espace au sol recommandé |
W8000*L20000*H2000 |
mm |
/ |
| Puissance totale maximale |
60 |
kW |
/ |
| Tension/fréquence d'entrée nominale |
380+/-10% |
V |
Triphasé |
| Fréquence d'entrée nominale |
50 |
Hz |
/ |
| Espace au sol |
10000*22000 |
mm |
/ |
III. Avantages du soudage robotisé :
 |
Système d'entraînement et de contrôle intégré au robot
1. Livré avec un système d'entraînement de robot intégré, révolutionnant le système de programmation pédagogique traditionnel.
2. Le logiciel planifie automatiquement la trajectoire de mouvement du robot et ajuste la posture de soudage.
3. La planification logicielle permet au robot d'éviter intelligemment les obstacles.
4. Équipé d'une détection et d'une surveillance des collisions. |
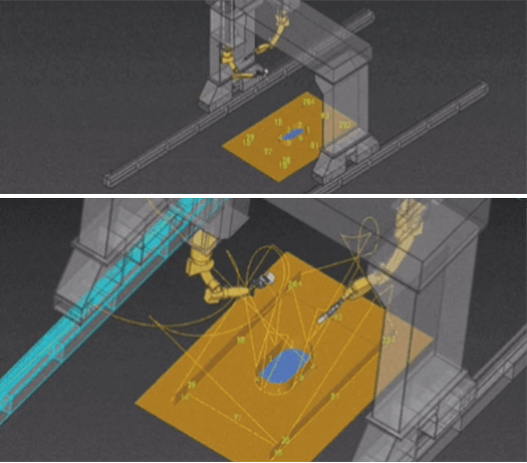
Système de jumeau numérique
1. Le modèle de scène présente une réplication 1:1 de l'objet physique : ce que vous voyez est ce que vous obtenez.
2. Fonctionnement via l'interface informatique, l'objet physique suivant les mouvements. 3. La trajectoire générée par la scène, la commande en un clic et le soudage peuvent commencer. 4. Communication en temps réel, intégration du virtuel et du physique, exécution des commandes. |
 |
 |
Pas d'enseignement, pas de programmation
1. Programmation automatique · Intelligent et pratique : importez le modèle 3D de la pièce, reconnaissez et extrayez automatiquement les informations sur les cordons de soudure. Vous pouvez modifier le cordon de soudure simplement en cliquant sur le modèle, ce qui réduit les difficultés opérationnelles et permet au personnel de démarrer facilement.
2. Commandes de processus · Déploiement rapide : les commandes de soudures d'angle, de soudage intermittent, multicouches et multipasses peuvent être sélectionnées en un seul clic.
3. Guidage visuel · Planification automatique du chemin : grâce au balayage laser linéaire, le robot localise rapidement les positions de début et de fin du cordon de soudure. |
Bibliothèque de processus de soudage intégrée
1. Importation de plans - Modélisation paramétrique : importez des plans 3D de la pièce. Prend en charge l'exportation et l'importation de plans de pièces avec des cordons de soudure déjà modifiés. Modélisation paramétrique pour des types similaires de pièces, tels que les goussets et les poutres en I.
2. Modification des cordons de soudure : sélectionnez les bords de soudure pour générer par lots des cordons de soudure, briser les trous de soudure et souder les bords en continu. Choisir les procédés de soudage en fonction du cordon de soudure (soudure multicouche et multipasse, coin vertical vers le haut).
3. Vérification de simulation : vérifiez si la trajectoire de course est raisonnable ou s'il y a des interférences. Assurez-vous que l'angle de soudage satisfait au processus de soudage. |
 |
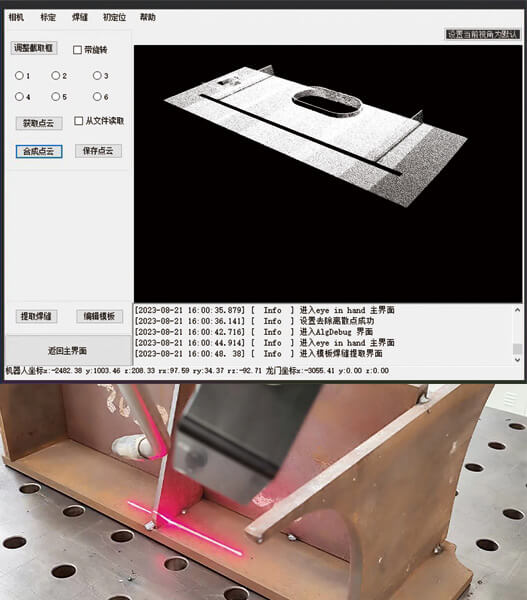 |
Module de positionnement et de suivi visuel
1. Positionnement initial de la caméra 3D :
capture une grande surface de 2 m x 2 m ; plusieurs photos peuvent être assemblées pour obtenir des données de nuages de points, sans vous soucier des pièces plus grandes.
La précision photographique a une marge d'erreur de ± 0,5 mm, répondant pleinement aux exigences de précision du soudage.
2. Module de guidage laser linéaire :
collecte activement les informations sur le cordon de soudure et les traite en temps réel, en analysant les images collectées pour acquérir la position du cordon de soudure, qui peut être utilisée pour corriger la trajectoire de soudage ou guider le soudage.
3. Caméra 3D composée « œil dans la main » :
résout les problèmes d'imagerie dans des conditions de travail complexes grâce au système « œil dans la main » :
(1). Grand champ de vision, haute précision, 3D.
(2). Reflète avec précision la position et la posture de la pièce à usiner, avec un temps de capture d'image pour obtenir le résultat inférieur à une seconde.
(3). Un positionnement précis évite les collisions pendant le processus de soudage.
(4). Fonctionnement de l'interface graphique complète : aucune expérience préalable en fonctionnement du robot n'est requise, complétant facilement l'ensemble du flux de travail. |
IV. Type de soudure de robot de soudage

Échantillons de soudage V.Robot